Guides IFOV et FOV
La résolution spatiale (IFOV)
Calculez vous-même vos distances de mesure ou taille de cible, pour n'importe quelle caméra.
Le champ de vision instantané (IFOV) VS le champ de vision "global" (FOV)
Une caméra thermique tout comme n'importe quelle caméra ou appareil photo "classique" possède un objectif qui définit directement son champ de vision (abrégé en FOV (Field Of View en anglais)). Grand-angle, télé-objectif, ou Macro, il est important de savoir quel champ de vision doit possèder une caméra selon l'application qui en sera faite.
Par exemple, l'analyse de ponts thermiques d'un bâtiment nécessite de visualiser la façade extérieure en entier. Bien souvent, pour ce besoin, et surtout si le recul n'est pas suffisant, un objectif grand-angle sera bien utile.
En revanche, en électricité, le besoin est d'analyser des éléments "isolés" (disjoncteur ou câble en surchauffe par exemple) à une distance de sécurité. Dans ce cas, un télé-objectif sera plus adapté.
Enfin, par exemple, en électronique, l'analyse de composants sur une carte électronique nécessite de se placer très proche de la carte afin d'obtenir un max. de détails. Dans ce contexte, un objectif Macro est idéal.
 |  | 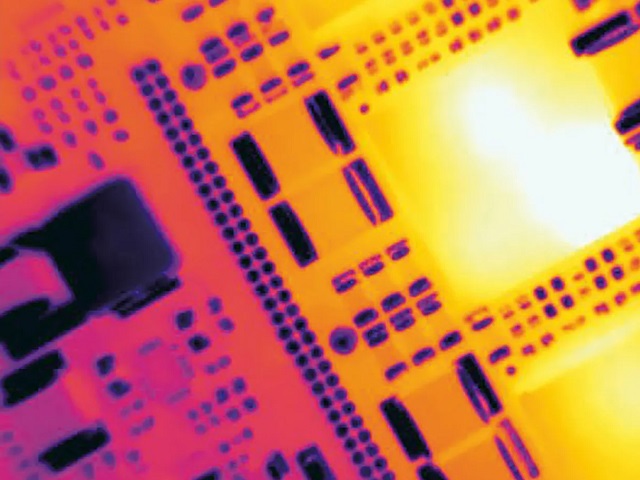 | ||
| Pont thermique bâtiment avec objectif grand-angle | Câble électrique en surchauffe avec télé-objectif | Carte électronique avec objectif Macro |
Pour en savoir plus sur les objectifs et le champ de vision des caméras thermiques, nous vous invitons à consulter notre guide dédié ici
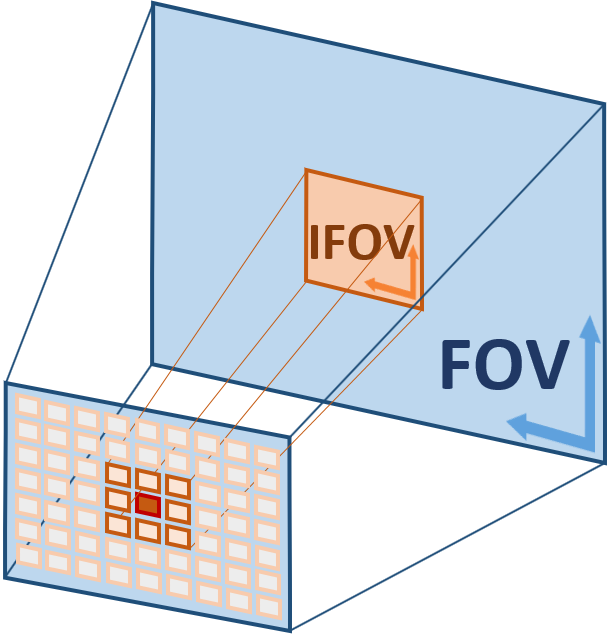
Le champ de vision d'une caméra thermographique ne dépends pas que de son optique, le capteur infrarouge (Microbolomètre) jou un rôle important également. Ce capteur est une matrice rectangulaire composée de plusieurs détecteurs infrarouge. Sa forme rectangulaire implique que son champ de vision est donné à la fois en vertical et en horizontal, on parle alors de champ de vision horizontal (HFOV) et de champ de vision vertical (VFOV). Le champ de vision (FOV, HFOV ou VFOV) est exprimé en degré (°).
 |
Le champ de vision total (FOV), permet de définir la taille de la zone que permet de voir la caméra infrarouge à une distance donnée. Cela est très pratique, mais il y a un paramètre encore plus utile. En effet, il est interessant de savoir quels sont les détails que voit une caméra à une distance donnée. Pour cela, nous nous référons à une autre paramètre appelé le champ de vision instantané (abrégé iFOV (Instantaneous Field Of View en anglais)) aussi appelé résolution spatiale.
Le champ de vision instantané IFOV
On l'a vu plus haut, le capteur infrarouge est constitué d'une matrice de plusieurs détecteurs infrarouge. Chaque détecteur infrarouge, donc chaque élément du capteur d'une caméra thermique, possède son propre champ de vision, c'est ce qu'on appele l'IFOV.
L'IFOV est toujours exprimé en mrad (milli radians), et représente en fin de compte la plus petite zone que chaque détecteur peut détecter. Autrement dit, il représente le plus petit point (la plus petite cible) qu'une caméra thermique peut détecter. Une caméra étant à la fois un outil de visualisation et de mesure, l'IFOV est le plus petit élément qu'une caméra thermique peut voir et mesurer.
C'est pour cela que l'on parle de résolution spatiale. La résolution, dans la mesure, représente le plus petit dénominateur mesurable/détectable par un appareil de mesure.
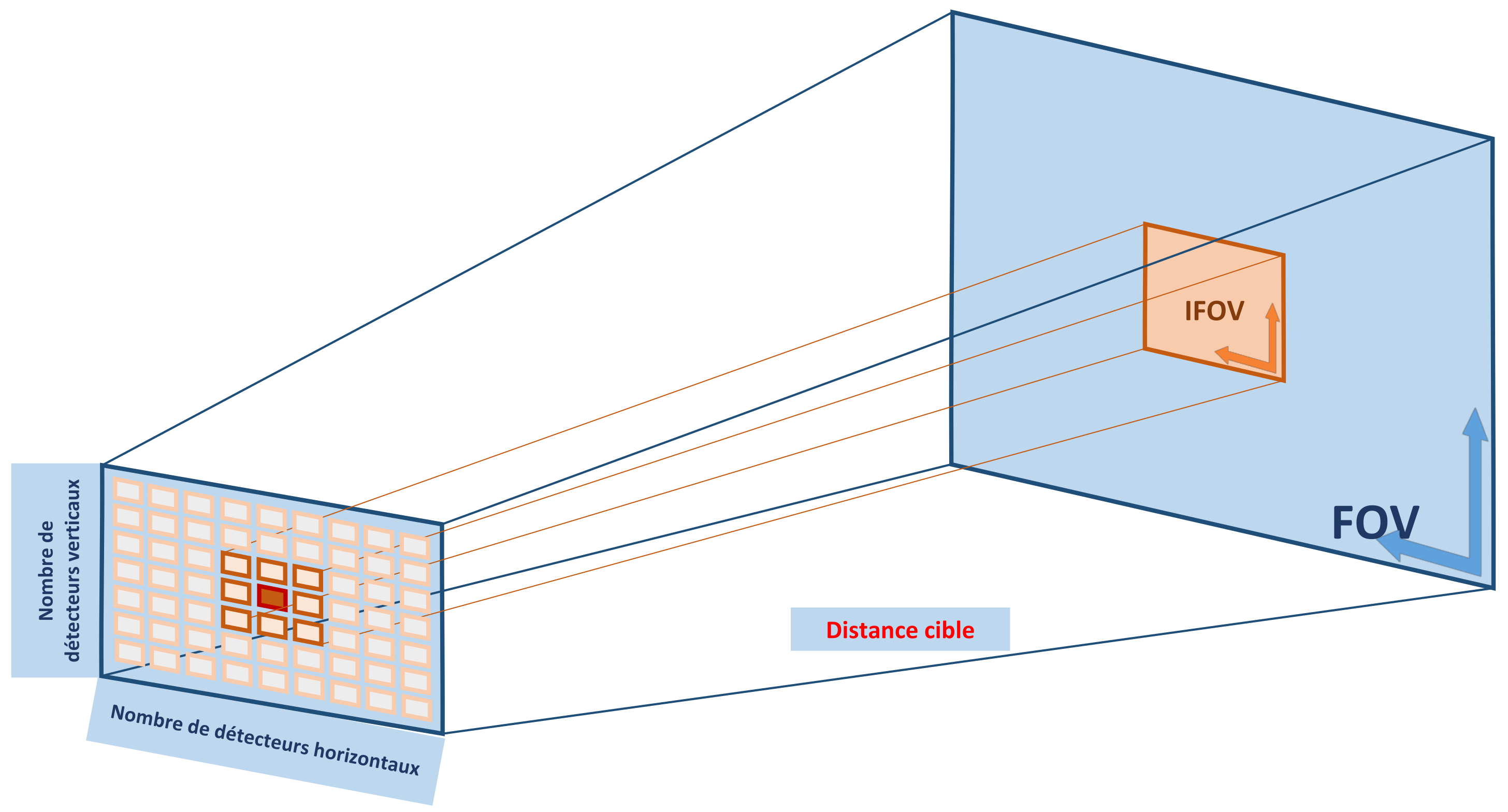
Le FOV et l'IFOV étant exprimés en dégré/angle ((°) pour le FOV et mrad pour l'IFOV), si l'on souhaite connaitre soit la distance à laquelle positionner la caméra infrarouge pour observer une cible de taille connue soit connaitre la taille de cible visible à une distance connue, un petit calcul est nécessaire :
IFOV (°) = HFOV(°) / ndH = VFOV(°) / ndV
OU
IFOV (mrad) = [HFOV(°) x PI x 1000] / [ndH x 180°] = [VFOV(°) x PI x 1000] / [ndV x 180°]
Avec :
- HFOV : angle horizontal sous lequel la caméra voit la scène thermique.
- VFOV : angle vertical sous lequel la caméra voit la scène thermique.
- ndH : nombre de détecteurs sur une ligne (horizontal).
- ndV : nombre de détecteurs sur une colonne (vertical).
Remarque : Le mrad est une unité d'angle. A 1m de distance, 1 mrad signifi que l'on verra une cible d'1 mm à la verticale ou à l'horizontale.
Ici, on voit que l'IFOV peut se calculer soit en horizontal, soit en vertical. En réalité, comme la plupart du temps le capteur infrarouge est rectangulaire, on fait les 2 calculs, afin de s'assurer de savoir dans quel sens est le capteur infrarouge. Cela permet aussi de s'assurer que le calcul est correct : Une valeur identique (ou trèsproche dû aux éventuelles approximations, arrondis que l'on fait pour le calcul) en vertical et en horizontal doit être trouvée.
ATTENTION :
L'IFOV impact à la fois ce que voit la caméra et ce qu'elle mesure. Ainsi, un mauvais IFOV dégradera la visualisation, et donc la qualité (résolution) de l'image, et également la précision de la mesure.
Côté visualisation, l'IFOV tel que calculé ci-dessus convient généralement bien, mais n'est pas idéal.
En revanche, pour la mesure, afin d'obtenir une précision de mesure correcte, ou plutôt pour ne pas impacter la précision de mesure, on considère qu'il faut que la zone ciblée avec la caméra soit recouverte par au moins 3 détecteurs. C'est à dire que pour obtenir une précision/résolution suffisante, il faut un IFOV au moins 3 fois meilleur que celui pris en compte pour la visualisation.
Exemple : Si l'on souhaite voir sur l'image thermique de la caméra un point aussi petit que 1mm à 1m de distance, il faut une caméra dont son IFOV est de 1mrad. Pour obtenir une mesure correcte en température (°C) de ce même point à une même distance il faut une caméra dont l'IFOV serait de 0.33 mrad.
Une autre façon de voir les choses, est que pour un même point à visualiser et mesurer on adaptera la distance à laquelle se placer pour obtenir une bonne mesure. Si on reprends notre exemple, pour mesurer correctement le point de 1mm avec une caméra dont l'IFOV est de 1 mrad il faudrait se placer à une distance 3 fois inférieure, soit 0.33m, afin de recouvrir le point correctement (c'est à dire par au moins 3 détecteurs).
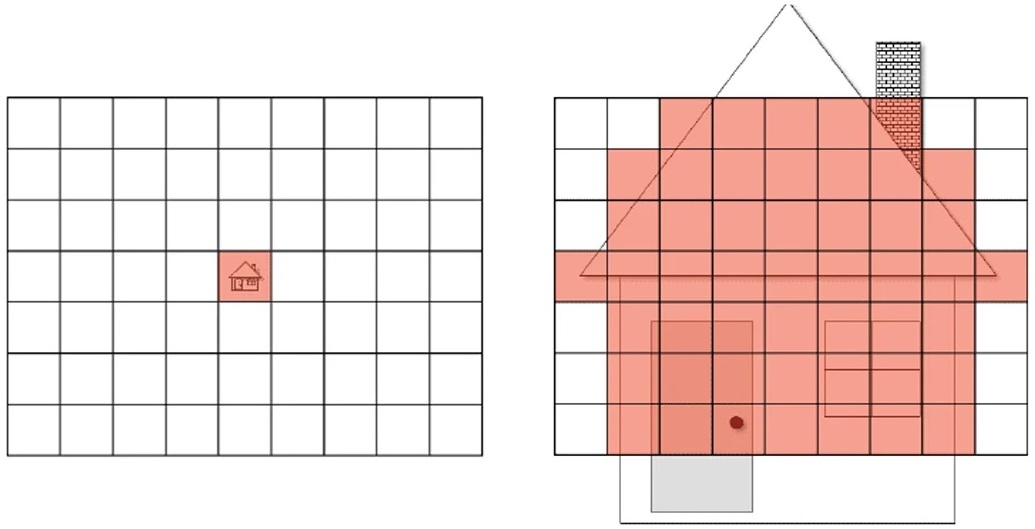
Pour mieux comprendre, l'illustration ci-dessous explique l'impact de l'IFOV. On y voit 2 dessins d'une même maison recouverte par une grille. La grille représente la matrice de détecteurs infrarouge, c'est à dire le capteur infrarouge d'une caméra. A gauche la maison est recouverte par seulement 1 détecteur, sur la seconde par une multitudes. On imagine alors très bien, sur la 1ère que la mesure de température sur un élément précis de la maison sera impossible. Et même, la visualisation est déjà très compliqué, aucun détails n'apparait. Sur la seconde en revanche, on est capable d'identifier très clairment chaque partie de la maison, les mesures de points particuliers de celle-ci seront aisés.
Afin de vous aider à connaitre la distance de visualisation et/ou la taille de la cible obtenable avec une caméra, nous avons développé un petit calculateur d'IFOV et de FOV. Vous le trouverez au lien ci-dessous.
Ce calculateur fonctionne pour n'importe quelle caméra thermique.